

VREP循迹小车
发布于2019-08-07 11:28 阅读(606) 评论(0) 点赞(1) 收藏(3)
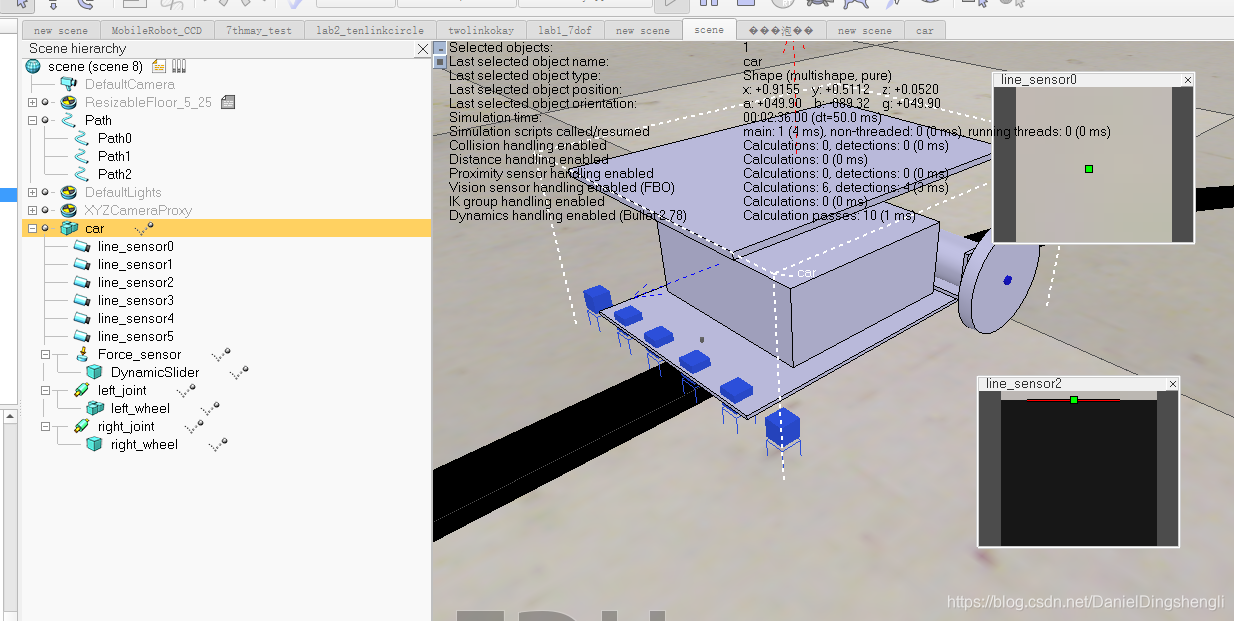
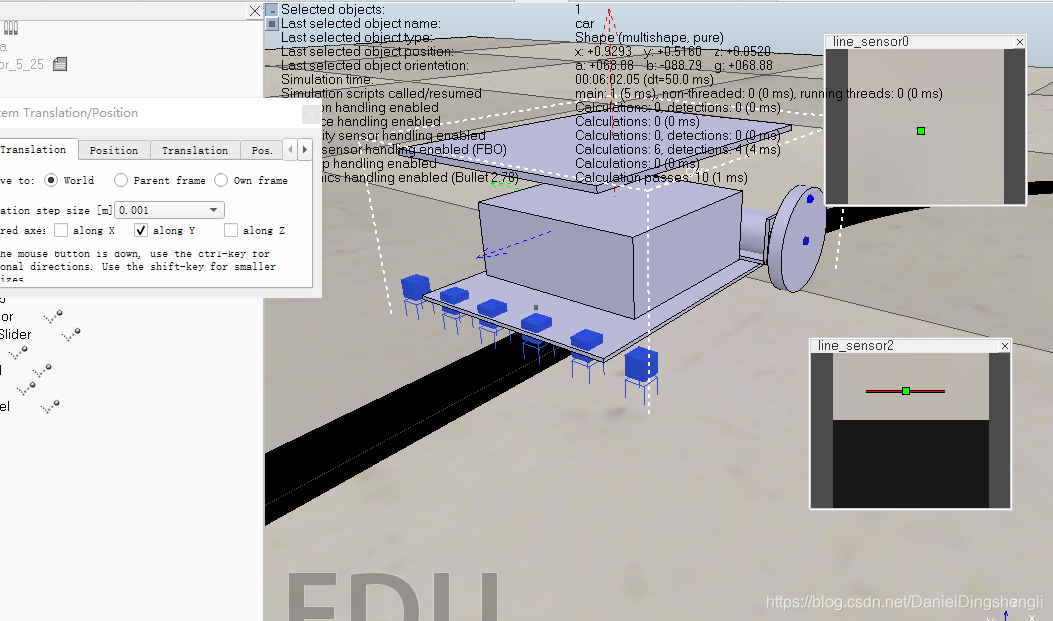
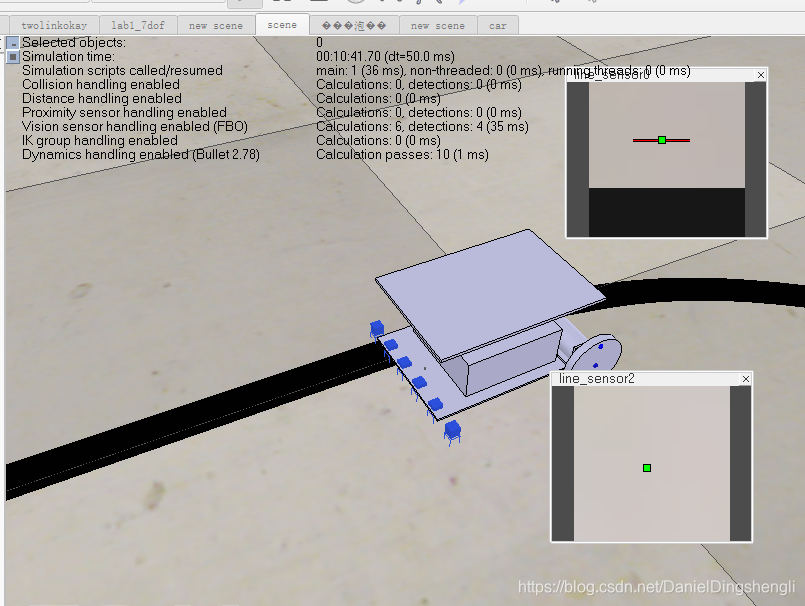
VREP循迹小车

蓝色部分是视觉传感器
黑色是路径
代码
#Getting motor handles
errorCode,left_motor_handle=vrep.simxGetObjectHandle(clientID,"left_joint",vrep.simx_opmode_oneshot_wait)
errorCode,right_motor_handle=vrep.simxGetObjectHandle(clientID,"right_joint",vrep.simx_opmode_oneshot_wait)
sensor_h=[] #handles list
sensor_val=[] #Sensor value list
#Getting sensor handles list
for x in range(0,6):
errorCode,sensor_handle=vrep.simxGetObjectHandle(clientID,'line_sensor'+str(x),vrep.simx_opmode_oneshot_wait)
sensor_h.append(sensor_handle) #It is adding sensor handle values
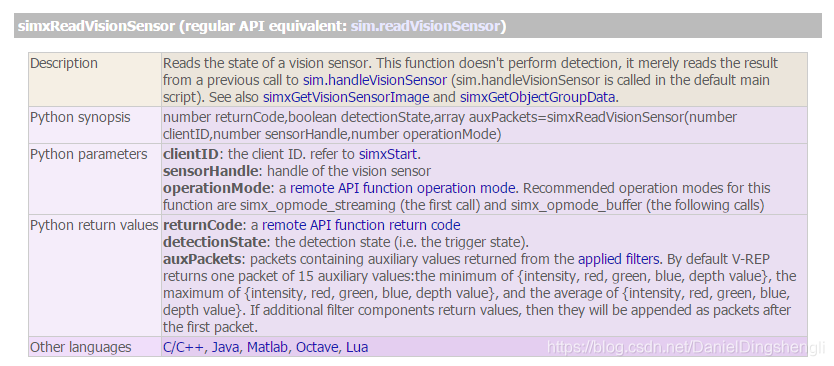
errorCode,detectionstate, sensorreadingvalue=vrep.simxReadVisionSensor(clientID,sensor_h[x],vrep.simx_opmode_streaming)
sensor_val.append(1.0) #It is adding 1.0 to fill the sensor values on the list. In the while loop it is going to overwrite the values
time.sleep(1)
t = time.time() #It is saving the time which is now
while (1): #Cycle which doesn't end
#It is writing down sensor handles and reading values
summa = 0 #It is zeroing the sum
andur = 0 #and the sensor values
for x in range(0,6):
errorCode,detectionstate, sensorreadingvalue=vrep.simxReadVisionSensor(clientID,sensor_h[x],vrep.simx_opmode_buffer)
#Reading sensor values
sensor_val[x]=sensorreadingvalue[1][0] #It is overwriting the sensor values
print "Positsiooni väärtus kokku45 :",sensor_val[x] ,x
if sensor_val[2]<=0.2 or sensor_val[3]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,10, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,10, vrep.simx_opmode_streaming)
if sensor_val[1]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,13, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,10, vrep.simx_opmode_streaming)
if sensor_val[0]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,16, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,10, vrep.simx_opmode_streaming)
if sensor_val[4]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,10, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,13, vrep.simx_opmode_streaming)
if sensor_val[5]<=0.2:
errorCode=vrep.simxSetJointTargetVelocity(clientID,left_motor_handle,10, vrep.simx_opmode_streaming)
errorCode=vrep.simxSetJointTargetVelocity(clientID,right_motor_handle,16, vrep.simx_opmode_streaming)
viivitus = round((time.time()-t),5) #calculating delay time
print "viivitus on: ", viivitus
t = time.time() #Taking new time moment
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
原理解释:
所属网站分类: 技术文章 > 博客
作者:短发越来越短
链接:https://www.pythonheidong.com/blog/article/10353/133f51c044fb90bcc3f6/
来源:python黑洞网
任何形式的转载都请注明出处,如有侵权 一经发现 必将追究其法律责任
昵称:
评论内容:(最多支持255个字符)
---无人问津也好,技不如人也罢,你都要试着安静下来,去做自己该做的事,而不是让内心的烦躁、焦虑,坏掉你本来就不多的热情和定力