

Pytorch学习第六讲:实现裁剪后的resnet50
发布于2019-08-22 16:43 阅读(1528) 评论(0) 点赞(18) 收藏(2)
先上一个pytorch里自带的一个版本
这个版本实现的比较简洁优雅,但如果你想自己改变一些参数,就比较难调,所以这篇文章,会基于该版本中最基本的一个bottleblock来做一个自己实现的版本,这个版本更方便修改参数,调试等。
import torch.nn as nn
import torch.nn.functional as F
import math
import torch
def conv3x3(in_plane, out_plane, stride=1):
return nn.Conv2d(in_plane, out_plane, kernel_size=3, stride=stride, padding=1, bias=True)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_planes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(in_planes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm1d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class BottleBlock(nn.Module):
expansion = 4
def __init__(self, in_planes, planes, stride, downsample=None):
super(BottleBlock, self).__init__()
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=True)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = conv3x3(planes, planes, stride)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes*4, kernel_size=1, bias=True)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
print(residual.shape)
print(x.shape)
print(out.shape)
out += residual
out = self.relu(out)
return out
class VVResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000):
self.inplanes=64
# Special attributes
self.input_space=None
self.input_size=(299, 299, 3)
self.mean = None
self.std = None
super(VVResNet, self).__init__()
# Modules
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=True)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.last_layer = nn.Linear(512*block.expansion, num_classes)
# initialize params
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion, kernel_size=1, stride=stride, bias=True),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def features(self, input):
x = self.conv1(input)
self.conv1_input = x.clone()
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
return x
def logits(self, features):
adaptiveAvgPoolWidth = features.shape[2]
x = F.avg_pool2d(features, kernel_size=adaptiveAvgPoolWidth)
x = x.view(x.size(0), -1)
x = self.last_layer(x)
return x
def forward(self, input):
x = self.features(input)
x = self.logits(x)
return x
def VVresnet50(num_classes=1000):
# model = VVResNet(BottleBlock, [3, 4, 6, 3], num_classes=num_classes)
model = VVResNet(BottleBlock, [1, 1, 1, 1], num_classes)
return model
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
这个版本,只有bottleblock一个基本的单元,其他就按照resnet的各类操作,序列式的搭建了一下网络,bottleblock基本单元如下:
def conv3x3(inplanes, outplanes, stride=1):
return nn.Conv2d(inplanes, outplanes, kernel_size=3, stride=stride, padding=1, bias=True)
class BottleBlock(nn.Module):
def __init__(self, inplanes, planes, stride):
super(BottleBlock, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=True)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = conv3x3(planes, planes, stride)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes*4, kernel_size=1, bias=True)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = nn.Sequential(
nn.Conv2d(inplanes, planes*4, kernel_size=1, stride=stride, bias=True),
nn.BatchNorm2d(planes*4)
)
def forward(self, x):
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
此段代码实现的就是论文中的这个结构:
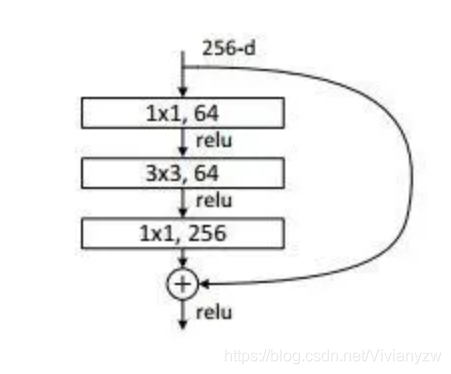
那么有了这个基础结构,其他的部分,就很方便实现了:
当然原文中resnet50的block部分,是使用了[2,3,8,3]的block,我这里给简化成了[1,1,1,1],如果你想增加block数,就在这个基础上增加self.block就好啦。参数自己随意定义,只要通道数等参数设置正确了就可以了。这样的实现方式在调整网络参数时更加方便了。
class VVResnet50(nn.Module):
def __init__(self):
super(VVResnet50, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=True)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(3, 2, 1)
self.block1 = BottleBlock(64, 64, 1)
self.block2 = BottleBlock(256, 128, 2)
self.block3 = BottleBlock(512, 256, 2)
self.block4 = BottleBlock(1024, 512, 2)
self.last_layer = nn.Linear(2048, 1000)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.block1(x)
x = self.block2(x)
x = self.block3(x)
x = self.block4(x)
x = F.avg_pool2d(x, 7)
x = x.view(x.size(0), -1)
x = self.last_layer(x)
return x
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
可以通过下列代码查看一下网络参数:
if __name__ == "__main__":
from torchsummary import summary
model = VVResnet50()
input = torch.randn(size=(1, 3, 224, 224), dtype=torch.float32)
# print(model)
summary(model, (3, 224, 224), device='cpu')
- 1
- 2
- 3
- 4
- 5
- 6
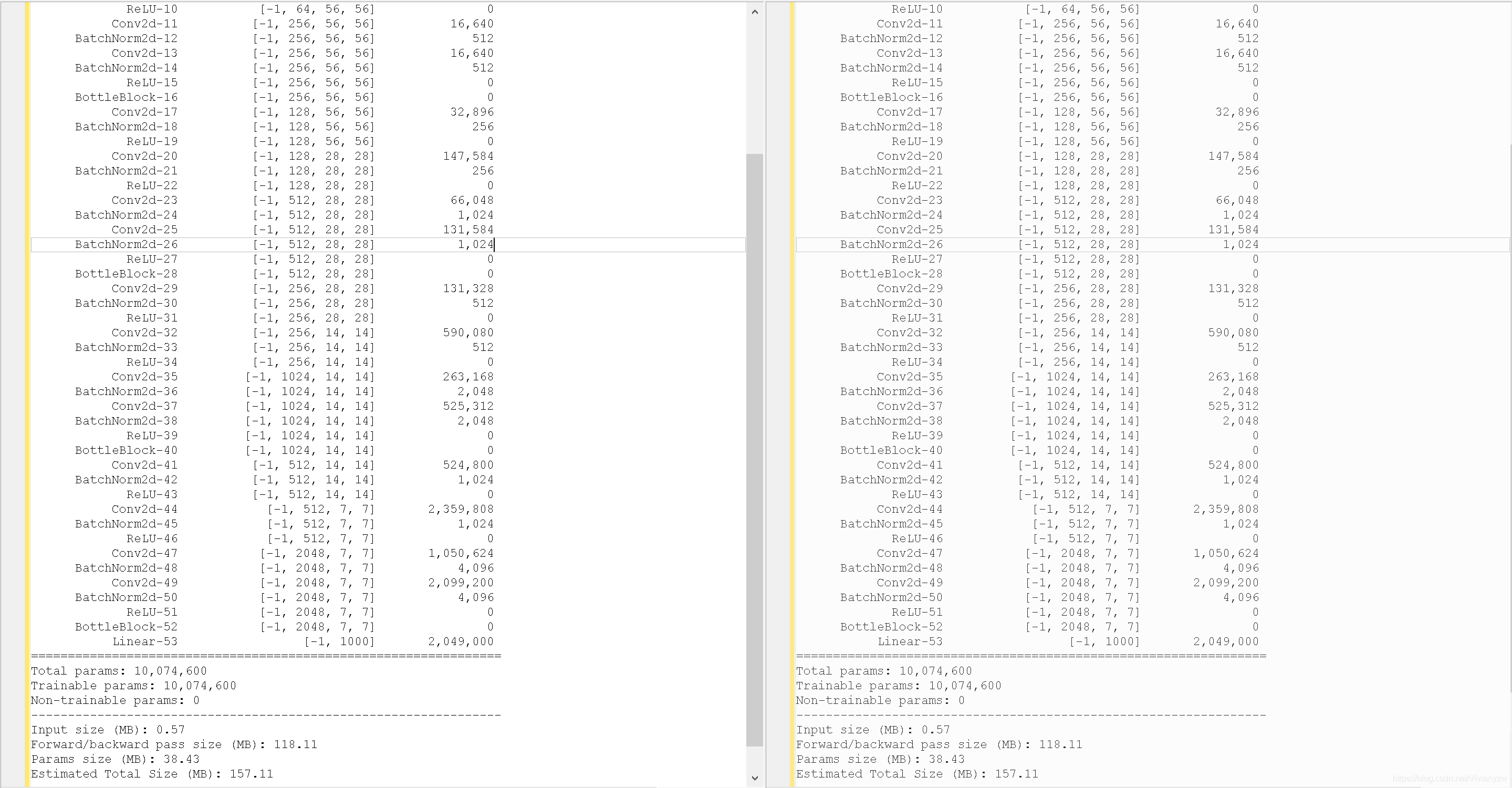
我也打印了两个实现方式网络,完全相同:
所属网站分类: 技术文章 > 博客
作者:皇后娘娘别惹我
链接:https://www.pythonheidong.com/blog/article/52993/1c18e49dd3eefbdeb8f7/
来源:python黑洞网
任何形式的转载都请注明出处,如有侵权 一经发现 必将追究其法律责任
昵称:
评论内容:(最多支持255个字符)
---无人问津也好,技不如人也罢,你都要试着安静下来,去做自己该做的事,而不是让内心的烦躁、焦虑,坏掉你本来就不多的热情和定力