

手把手教用matlab做无人驾驶(十)--纯跟踪算法(pure control)的补充l---python与matlab/simulink两种语言的编程实现
发布于2019-08-06 10:25 阅读(4535) 评论(0) 点赞(4) 收藏(1)
已经半年没有关注博客了,由于当时工作太忙的原因,现在终于有时间再次回归博客了,再这半年的时间里由于没在,许多人留言希望上传pure control代码,现在这里会上传python与matlab/simulink两个版本代码,仅供参考。欢迎大家以后多多交流,一起写点东西。
好的,言归正传,来说说pure control,部分内容请参考手把手教用matlab做无人驾驶(四),这里再补充点公式:
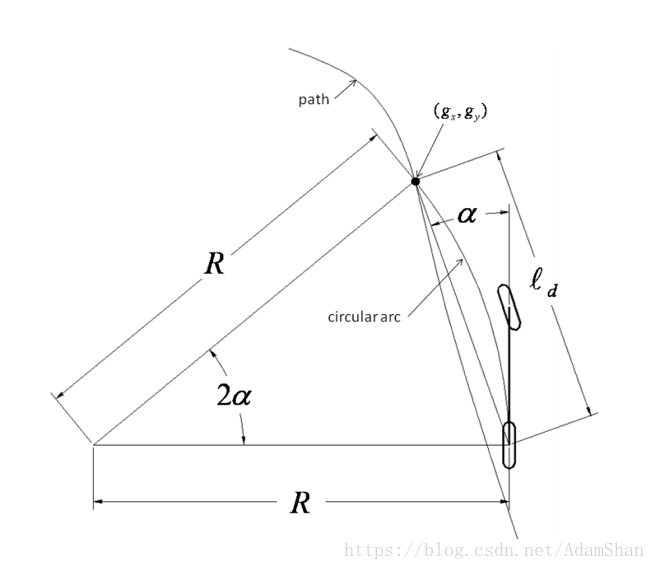
前轮转角 δ,为了更好的理解纯追踪控制器的原理,我们定义一个新的量:el—— 车辆当前姿态和目标路点在横向上的误差,由此可得夹角正弦:
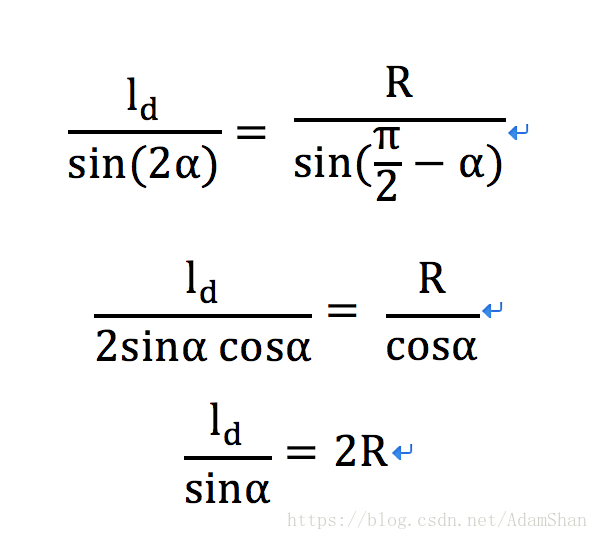
由上面的正弦定理可得下面:
由上面的公式可得
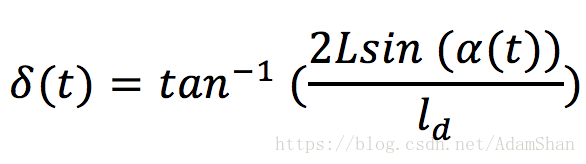
alpha = math.atan2(ty - state.rear_y, tx - state.rear_x) - state.yaw
基于上面的公式,我们现在给出python 代码:
"""
Path tracking simulation with pure pursuit steering control and PID speed control.
author: Atsushi Sakai (@Atsushi_twi)
"""
import numpy as np
import math
import matplotlib.pyplot as plt
k = 0.1 # look forward gain
Lfc = 2.0 # look-ahead distance
Kp = 1.0 # speed proportional gain
dt = 0.1 # [s]
L = 2.9 # [m] wheel base of vehicle
old_nearest_point_index = None
show_animation = True
class State:
def __init__(self, x=0.0, y=0.0, yaw=0.0, v=0.0):
self.x = x
self.y = y
self.yaw = yaw
self.v = v
self.rear_x = self.x - ((L / 2) * math.cos(self.yaw))
self.rear_y = self.y - ((L / 2) * math.sin(self.yaw))
def update(state, a, delta):
state.x = state.x + state.v * math.cos(state.yaw) * dt
state.y = state.y + state.v * math.sin(state.yaw) * dt
state.yaw = state.yaw + state.v / L * math.tan(delta) * dt
state.v = state.v + a * dt
state.rear_x = state.x - ((L / 2) * math.cos(state.yaw))
state.rear_y = state.y - ((L / 2) * math.sin(state.yaw))
return state
def PIDControl(target, current):
a = Kp * (target - current)
return a
def pure_pursuit_control(state, cx, cy, pind):
ind = calc_target_index(state, cx, cy)
if pind >= ind:
ind = pind
if ind < len(cx):
tx = cx[ind]
ty = cy[ind]
else:
tx = cx[-1]
ty = cy[-1]
ind = len(cx) - 1
alpha = math.atan2(ty - state.rear_y, tx - state.rear_x) - state.yaw
Lf = k * state.v + Lfc
delta = math.atan2(2.0 * L * math.sin(alpha) / Lf, 1.0)
return delta, ind
def calc_distance(state, point_x, point_y):
dx = state.rear_x - point_x
dy = state.rear_y - point_y
return math.sqrt(dx ** 2 + dy ** 2)
def calc_target_index(state, cx, cy):
global old_nearest_point_index
if old_nearest_point_index is None:
# search nearest point index
dx = [state.rear_x - icx for icx in cx]
dy = [state.rear_y - icy for icy in cy]
d = [abs(math.sqrt(idx ** 2 + idy ** 2)) for (idx, idy) in zip(dx, dy)]
ind = d.index(min(d))
old_nearest_point_index = ind
else:
ind = old_nearest_point_index
distance_this_index = calc_distance(state, cx[ind], cy[ind])
while True:
ind = ind + 1 if (ind + 1) < len(cx) else ind
print("ind=%d",ind);
distance_next_index = calc_distance(state, cx[ind], cy[ind])
if distance_this_index < distance_next_index:
break
distance_this_index = distance_next_index
old_nearest_point_index = ind
L = 0.0
#Lf = k * state.v + Lfc
Lf=Lfc;
# search look ahead target point index
while Lf > L and (ind + 1) < len(cx):
dx = cx[ind] - state.rear_x
dy = cy[ind] - state.rear_y
L = math.sqrt(dx ** 2 + dy ** 2)
ind += 1
return ind
def plot_arrow(x, y, yaw, length=1.0, width=0.5, fc="r", ec="k"):
"""
Plot arrow
"""
if not isinstance(x, float):
for (ix, iy, iyaw) in zip(x, y, yaw):
plot_arrow(ix, iy, iyaw)
else:
plt.arrow(x, y, length * math.cos(yaw), length * math.sin(yaw),
fc=fc, ec=ec, head_width=width, head_length=width)
plt.plot(x, y)
def main():
# target course
cx = np.arange(0, 50, 0.1)
cy = [math.sin(ix / 5.0) * ix / 2.0 for ix in cx]
target_speed = 10.0 / 3.6 # [m/s]
T = 100.0 # max simulation time
# initial state
state = State(x=-0.0, y=-3.0, yaw=0.0, v=0.0)
lastIndex = len(cx) - 1
time = 0.0
x = [state.x]
y = [state.y]
yaw = [state.yaw]
v = [state.v]
t = [0.0]
target_ind = calc_target_index(state, cx, cy)
while T >= time and lastIndex > target_ind:
ai = PIDControl(target_speed, state.v)
di, target_ind = pure_pursuit_control(state, cx, cy, target_ind)
state = update(state, ai, di)
time = time + dt
x.append(state.x)
y.append(state.y)
yaw.append(state.yaw)
v.append(state.v)
t.append(time)
if show_animation: # pragma: no cover
plt.cla()
plot_arrow(state.x, state.y, state.yaw)
plt.plot(cx, cy, "-r", label="course")
plt.plot(x, y, "-b", label="trajectory")
plt.plot(cx[target_ind], cy[target_ind], "xg", label="target")
plt.axis("equal")
plt.grid(True)
plt.title("Speed[km/h]:" + str(state.v * 3.6)[:4])
plt.pause(0.001)
# Test
assert lastIndex >= target_ind, "Cannot goal"
if show_animation: # pragma: no cover
plt.cla()
plt.plot(cx, cy, ".r", label="course")
plt.plot(x, y, "-b", label="trajectory")
plt.legend()
plt.xlabel("x[m]")
plt.ylabel("y[m]")
plt.axis("equal")
plt.grid(True)
plt.subplots(1)
plt.plot(t, [iv * 3.6 for iv in v], "-r")
plt.xlabel("Time[s]")
plt.ylabel("Speed[km/h]")
plt.grid(True)
plt.show()
if __name__ == '__main__':
print("Pure pursuit path tracking simulation start")
main()
这段代码对于懂python的同学来说很简单,仿真结果如下,这个可以调节参数更好:

现在给出matlab/simulink 代码:

这里的数据都是基于全局坐标系做的,主要分为三个模块,lookaheadAnalyser、Pure Pursuit、Vehicle Model,其中lookaheadAnalyser主要找到目标点,Pure Pursuit主要是实现控制,Vehicle Model是模型。
仿真结果如下:

lookaheadAnalyser中代码如下,我用了一个fcn函数:
function [y,old_nearest_point_indexnew] = fcn(lookdistance,curpos,repos,old_nearest_point_index)
d=zeros(1,size(repos,1));
curpos = reshape(curpos,1,3)
%if old_nearest_point_index==1
%search nearest point index
for i=1:size(repos,1)
%d(i)=sqrt((curpos(1,1)-repos(i,1))^2+(curpos(1,2)-repos(i,2))^2)
d(i)=norm(curpos(1,1:2)-repos(i,1:2));
end
[min_d ind]=min(d);
old_nearest_point_index=ind;
%else
% ind = old_nearest_point_index;
% distance_this_index = norm(curpos(1,1:2)-repos(ind,1:2));
%while true
% if (ind + 1) < size(repos,1)
ind = ind + 1 ;
% else
% ind=ind;
% end
% distance_next_index=norm(curpos(1,1:2)-repos(ind,1:2));
%if distance_this_index < distance_next_index
% break;
% end
% distance_this_index = distance_next_index;
% end
% old_nearest_point_index = ind;
% disp("caokaifa");
% end
L = 0.0;
k=0.1;
v=0.5;
Lfc=lookdistance;
Lf =0.3;
% search look ahead target point index
while Lf > L && (ind + 1) < size(repos,1)
L = norm(curpos(1,1:2)-repos(ind,1:2))
ind =ind+1
%disp("%d",ind)
end
f = repos(ind,1:2);
y=f';
old_nearest_point_indexnew=cast(old_nearest_point_index, 'like', curpos);
Pure Pursuit两部分组成,计算lateralErr和PID控制转换为steerCmd:

注意,这里的matlab程序我是在maltab2019a环境下运行的,如果下载的代码不能运行,请更新maltab为2019a,破解版网上好多,这里就不介绍了。maltab代码下载地址:
https://download.csdn.net/download/caokaifa/11233981
python代码下载直接上面复制粘贴就可以运行
所属网站分类: 技术文章 > 博客
作者:mimi
链接:https://www.pythonheidong.com/blog/article/7649/a5989f4bfeb6c7eaedb8/
来源:python黑洞网
任何形式的转载都请注明出处,如有侵权 一经发现 必将追究其法律责任
昵称:
评论内容:(最多支持255个字符)
---无人问津也好,技不如人也罢,你都要试着安静下来,去做自己该做的事,而不是让内心的烦躁、焦虑,坏掉你本来就不多的热情和定力